
_arrives_London_Heathrow_11Apr2015_arp.jpg/1280px-Royal_Jordanian_Airlines_Boeing_787-8_(JY-BAA)_arrives_London_Heathrow_11Apr2015_arp.jpg)
پرواز یا پرواز فرآیندی است که طی آن یک جسم در یک فضا بدون تماس با هیچ سطح سیاره ای حرکت می کند ، چه در یک جو (به عنوان مثال پرواز هوایی یا هوانوردی ) یا از طریق خلاء فضای بیرونی (یعنی پرواز فضایی ). این را می توان با ایجاد بالابر آیرودینامیکی مرتبط با سر خوردن یا رانش پیشرانه ، به صورت آئرواستاتیک با استفاده از شناوری ، یا با حرکت بالستیک به دست آورد.
چیزهای زیادی میتوانند پرواز کنند، از هوانوردان حیوانات مانند پرندگان ، خفاشها و حشرات گرفته تا گلایدرها/چتربازان طبیعی مانند حیوانات پاتاگیال ، دانههای انیموکرو و بالیستوسپورها ، تا اختراعات انسانی مانند هواپیما ( هواپیما ، هلیکوپتر ، کشتی هوایی ، بالن و غیره) و موشک . که ممکن است فضاپیماها و هواپیماهای فضایی را به حرکت درآورد .
جنبههای مهندسی پرواز، حوزهی مهندسی هوافضا است که به دو دستهی هوانوردی ، مطالعه وسایل نقلیهای که در جو سفر میکنند، و فضانوردی ، مطالعه وسایل نقلیهای که در فضا سفر میکنند، و بالستیک ، مطالعه پرواز پرتابهها تقسیم میشود.

انسان ها به دلیل شناور بودنشان در هوا موفق به ساخت وسایل نقلیه سبک تر از هوا شده اند که از زمین بلند می شوند و پرواز می کنند .
آئروستات سیستمی است که عمدتاً از طریق استفاده از شناور در هوا باقی می ماند تا به هواپیما چگالی کلی مشابه هوا بدهد. هوانوردی ها شامل بالون های رایگان ، کشتی های هوایی و بالن های لنگردار هستند . جزء ساختاری اصلی یک آئروستات پوشش آن است، پوسته ای سبک که حجمی از گاز بالابر [1] [2] را برای ایجاد شناوری ، که اجزای دیگر به آن متصل هستند، در بر می گیرد.
هواسازها به این دلیل نامیده می شوند که از بالابر "آئرواستاتیک" استفاده می کنند، نیروی شناوری که برای اعمال نیروی بالابر نیازی به حرکت جانبی در توده هوای اطراف ندارد. در مقابل، آئرودین ها عمدتاً از لیفت آیرودینامیکی استفاده می کنند که به حرکت جانبی حداقل بخشی از هواپیما از طریق توده هوای اطراف نیاز دارد.
برخی از چیزهایی که پرواز می کنند نیروی رانش را در هوا ایجاد نمی کنند، به عنوان مثال، سنجاب پرنده . به این حالت سر خوردن می گویند . برخی چیزهای دیگر می توانند از هوای بالارونده برای صعود استفاده کنند، مانند رپتورها (هنگام سر خوردن) و گلایدرهای هواپیمای بادبانی ساخت بشر . به این حالت اوج گرفتن می گویند . با این حال، بیشتر پرندگان دیگر و همه هواپیماهای موتوردار برای بالا رفتن به یک منبع نیروی محرکه نیاز دارند . به این پرواز برقی گفته می شود.



تنها گروههایی از موجودات زنده که از پرواز با نیرو استفاده میکنند، پرندگان ، حشرات و خفاشها هستند ، در حالی که بسیاری از گروهها در حال پرواز با هواپیما هستند. پتروسورهای منقرض شده ، دسته ای از خزندگان مقارن با دایناسورها ، نیز حیوانات پرنده بسیار موفقی بودند، [3] و ظاهراً دایناسورهای پرنده نیز وجود داشتند (به حیوانات پرنده و پرنده #دایناسورهای غیر پرنده مراجعه کنید ). بال های هر یک از این گروه ها به طور مستقل تکامل یافتند و حشرات اولین گروه حیوانی بودند که پرواز را تکامل دادند. [4] بالهای گروههای مهرهداران در حال پرواز همگی بر پایه اندامهای جلویی هستند، اما بهطور قابل توجهی در ساختار متفاوت هستند. فرض بر این است که بالهای حشرات نسخههای بسیار تغییر یافته ساختارهایی هستند که آبششها را در بیشتر گروههای دیگر بندپایان تشکیل میدهند . [3]
خفاش ها تنها پستاندارانی هستند که قادر به حفظ پرواز در سطح هستند (به پرواز خفاش مراجعه کنید ). [5] با این حال، چندین پستاندار در حال سر خوردن وجود دارند که قادرند از درختی به درخت دیگر با استفاده از غشاهای گوشتی بین اندام خود سر بخورند. برخی می توانند صدها متر را به این طریق با کاهش ارتفاع بسیار کمی طی کنند. قورباغه های پرنده از پاهای تاردار بزرگ شده برای اهداف مشابهی استفاده می کنند و مارمولک های پرنده ای وجود دارند که دنده های متحرک خود را به صورت یک جفت سطح صاف در حال حرکت تا می کنند. مارهای "پرنده" همچنین از دنده های متحرک برای صاف کردن بدن خود به شکل آیرودینامیکی استفاده می کنند، با حرکتی به جلو و عقب تقریباً مشابه آنچه روی زمین استفاده می کنند.
ماهی پرنده می تواند با استفاده از باله های بال مانند بزرگ شده سر بخورد و تا صدها متر اوج گرفتن مشاهده شده است. تصور می شود که این توانایی توسط انتخاب طبیعی انتخاب شده است زیرا وسیله ای موثر برای فرار از شکارچیان زیر آب بود. طولانی ترین پرواز ثبت شده یک ماهی پرنده 45 ثانیه بود. [6]
بیشتر پرندگان پرواز می کنند ( به پرواز پرنده مراجعه کنید )، به استثنای برخی موارد. بزرگترین پرندگان، شترمرغ و امو ، پرندگان بدون پرواز زمینی هستند ، مانند دودوهای منقرض شده و فوروسراسیدها ، که شکارچیان غالب آمریکای جنوبی در عصر سنوزوئیک بودند . پنگوئنهای غیرپرنده دارای بالهایی هستند که برای استفاده در زیر آب مناسب است و از همان حرکات بالهایی که بیشتر پرندگان دیگر برای پرواز استفاده میکنند، برای شنا استفاده میکنند. [ نیازمند منبع ] بیشتر پرندگان کوچک بدون پرواز بومی جزایر کوچک هستند و سبک زندگی را در پیش می گیرند که پرواز در آن مزیت چندانی ندارد.
در میان حیوانات زنده ای که پرواز می کنند، آلباتروس سرگردان بیشترین طول بال را دارد، تا 3.5 متر (11 فوت). بزرگ ترین بوستارد با 21 کیلوگرم (46 پوند) بیشترین وزن را دارد. [7]
بیشتر گونه های حشرات می توانند در بزرگسالی پرواز کنند. پرواز حشرات از یکی از دو مدل پایه آیرودینامیکی استفاده می کند: ایجاد یک گرداب لبه جلویی که در بیشتر حشرات یافت می شود و استفاده از کف زدن و پرت کردن که در حشرات بسیار کوچکی مانند تریپس یافت می شود . [8] [9]
بسیاری از گونههای عنکبوتها ، کنههای عنکبوتی و لپیدوپترها از تکنیکی به نام بالون کردن برای سوار شدن بر جریانهای هوا مانند گرما استفاده میکنند ، با افشای رشتههای گوسامر خود که توسط باد و میدانهای الکتریکی اتمسفر بلند میشوند .

پرواز مکانیکی استفاده از ماشین برای پرواز است. این ماشین ها شامل هواپیماهایی مانند هواپیما ، گلایدر ، هلیکوپتر ، اتوژیرو ، کشتی هوایی ، بالون ، پرنده کوپتر و همچنین فضاپیما می باشد . گلایدرها قادر به پرواز بدون نیرو هستند. شکل دیگری از پرواز مکانیکی، پارا بادبانی است که در آن یک جسم چتر مانند توسط یک قایق کشیده می شود. در هواپیما، بالابر توسط بال ها ایجاد می شود. شکل بال های هواپیما به طور خاص برای نوع پرواز مورد نظر طراحی شده است. بالها انواع مختلفی دارند: بالهای دمدخت، نیمهمرتفع، پشتی، مستطیلی و بیضوی. بال هواپیما گاهی اوقات ایرفویل نامیده می شود که وسیله ای است که هنگام عبور هوا از آن بالابر ایجاد می کند.
پرواز مافوق صوت سریعتر از سرعت صوت است . پرواز مافوق صوت با تشکیل امواج ضربه ای همراه است که بوم صوتی را تشکیل می دهد که از زمین شنیده می شود، [10] و اغلب شگفت انگیز است. ایجاد این موج ضربه ای به مقدار قابل توجهی انرژی نیاز دارد. به همین دلیل، پرواز مافوق صوت معمولاً بازدهی کمتری نسبت به پرواز زیر صوت در حدود 85 درصد سرعت صوت دارد.
پرواز مافوق صوت پروازی با سرعت بسیار بالا است که در آن گرمای ایجاد شده در اثر فشردگی هوا در اثر حرکت در هوا باعث تغییرات شیمیایی در هوا می شود. پرواز مافوق صوت عمدتاً با ورود مجدد به فضاپیماهایی مانند شاتل فضایی و سایوز انجام می شود .

برخی چیزها بالابر کمی ایجاد میکنند یا اصلاً حرکت نمیکنند و فقط یا بیشتر تحت تأثیر تکانه، گرانش، کشش هوا و در برخی موارد رانش حرکت میکنند. این پرواز بالستیک نامیده می شود . به عنوان مثال می توان به توپ ، فلش ، گلوله ، آتش بازی و غیره اشاره کرد.
اساساً یک شکل افراطی از پرواز بالستیک، پرواز فضایی استفاده از فناوری فضایی برای رسیدن به پرواز فضاپیما به داخل و از طریق فضای بیرونی است . به عنوان مثال می توان به موشک های بالستیک ، پرواز فضایی مداری و غیره اشاره کرد.
از پروازهای فضایی در اکتشافات فضایی و همچنین در فعالیت های تجاری مانند گردشگری فضایی و مخابرات ماهواره ای استفاده می شود . کاربردهای غیرتجاری اضافی پروازهای فضایی شامل رصدخانه های فضایی ، ماهواره های شناسایی و سایر ماهواره های رصد زمین است .
یک پرواز فضایی معمولاً با پرتاب موشک آغاز می شود که نیروی رانش اولیه را برای غلبه بر نیروی گرانش فراهم می کند و فضاپیما را از سطح زمین به جلو می راند. [11] هنگامی که یک فضاپیما در فضا است، حرکت یک فضاپیما - چه زمانی که بدون پیشرانه و چه زمانی که در حال رانش است - توسط حوزه مطالعاتی به نام اختر دینامیک پوشش داده می شود . برخی از فضاپیماها به طور نامحدود در فضا می مانند، برخی در طول ورود مجدد به اتمسفر متلاشی می شوند و برخی دیگر برای فرود یا برخورد به سطح سیاره یا ماه می رسند.
در سال 2018، محققان مؤسسه فناوری ماساچوست (MIT) موفق شدند هواپیمای بدون قطعات متحرک را به پرواز درآورند که نیروی آن توسط یک " باد یونی " که به آن رانش الکتروآیرودینامیک نیز میگویند، هدایت میشد. [12] [13]
بسیاری از فرهنگهای انسانی وسایلی ساختهاند که پرواز میکنند، از اولین پرتابهها مانند سنگها و نیزهها، [14] [15] بومرنگ در استرالیا ، فانوس کونگمینگ هوای گرم ، و بادبادکها .
جورج کیلی در نیمه اول قرن نوزدهم پرواز را به طور علمی مطالعه کرد، [16] [17] [18] و در نیمه دوم قرن نوزدهم اتو لیلینتال بیش از 200 پرواز با هواپیما انجام داد و همچنین یکی از اولین کسانی بود که پرواز را به صورت علمی درک کرد. . کار او توسط برادران رایت که پروازهای سرنشین دار انجام دادند و در نهایت اولین پروازهای کنترل شده و توسعه یافته با نیروی انسانی را انجام دادند، تکرار و گسترش یافت . [19]
پروازهای فضایی، به ویژه پروازهای فضایی انسان در قرن بیستم به دنبال پیشرفت های نظری و عملی توسط کنستانتین تسیولکوفسکی و رابرت اچ. گودارد به واقعیت تبدیل شد . اولین پرواز فضایی مداری در سال 1957 بود، [20] و یوری گاگارین با اولین پرواز فضایی مداری خدمه در سال 1961 حمل شد. [21]

روش های مختلفی برای پرواز وجود دارد. اگر چگالی جسمی کمتر از هوا باشد ، شناور است و قادر است بدون صرف انرژی در هوا شناور شود . یک هواپیمای سنگین تر از هواپیما ، که به عنوان aerodyne شناخته می شود ، شامل حیوانات و حشرات پرواز، هواپیماهای بال ثابت و روتورکرافت است . از آنجایی که کشتی از هوا سنگینتر است، برای غلبه بر وزن خود باید بالابر ایجاد کند . مقاومت باد ناشی از حرکت کشتی در هوا را درگ می نامند و با رانش پیشرانه غلبه می کند مگر در حالت سر خوردن .
برخی از وسایل نقلیه نیز از نیروی رانش در محل بالابر استفاده می کنند. به عنوان مثال راکت ها و جت های پرشی هریر .

نیروهای مربوط به پرواز هستند [22]
این نیروها باید متعادل باشند تا پرواز پایدار رخ دهد.

یک هواپیمای بال ثابت زمانی که هوا در جهت مخالف پرواز رانده می شود، نیروی رانش به جلو ایجاد می کند. این کار را می توان به روش های مختلفی انجام داد، از جمله با پره های چرخان یک پروانه ، یا یک فن دوار که هوا را از پشت موتور جت به بیرون می راند ، یا با بیرون راندن گازهای داغ از موتور موشک . [23] رانش به جلو متناسب با جرم جریان هوا ضرب در اختلاف سرعت جریان هوا است. رانش معکوس را می توان برای کمک به ترمز پس از فرود با معکوس کردن گام تیغه های پروانه با گام متغیر یا استفاده از معکوس تراست روی موتور جت ایجاد کرد. هواپیماهای روتاری بال و بردار رانش هواپیماهای V/STOL از رانش موتور برای تحمل وزن هواپیما و مجموع بردار این رانش جلو و عقب برای کنترل سرعت رو به جلو استفاده می کنند.

در زمینه جریان هوا نسبت به بدنه پرنده، نیروی بالابر جزء نیروی آیرودینامیکی است که بر جهت جریان عمود است. [24] بالابر آیرودینامیکی زمانی به وجود میآید که بال باعث انحراف هوای اطراف میشود - پس از آن، هوا بر اساس قانون سوم حرکت نیوتن ، نیرویی را در جهت مخالف به بال وارد میکند .
بالابر معمولاً با بال هواپیما مرتبط است ، اگرچه بالابر توسط روتورهای روتورکرافت نیز ایجاد میشود (که در واقع بالهای چرخان هستند و همان عملکرد را بدون نیاز به حرکت هواپیما از طریق هوا به جلو انجام میدهند) . در حالی که معانی رایج کلمه "بالا" نشان می دهد که بالابر با جاذبه مخالف است، بالابر آیرودینامیکی می تواند در هر جهتی باشد. به عنوان مثال، هنگامی که یک هواپیما در حال حرکت است ، بالابر با جاذبه مخالف است، اما در هنگام بالا رفتن، فرود یا نشستن با یک زاویه، بالابر روی می دهد. در خودروهای پرسرعت، نیروی بالابر به سمت پایین هدایت میشود (به نام «نیروی پایین») تا خودرو در جاده پایدار بماند.
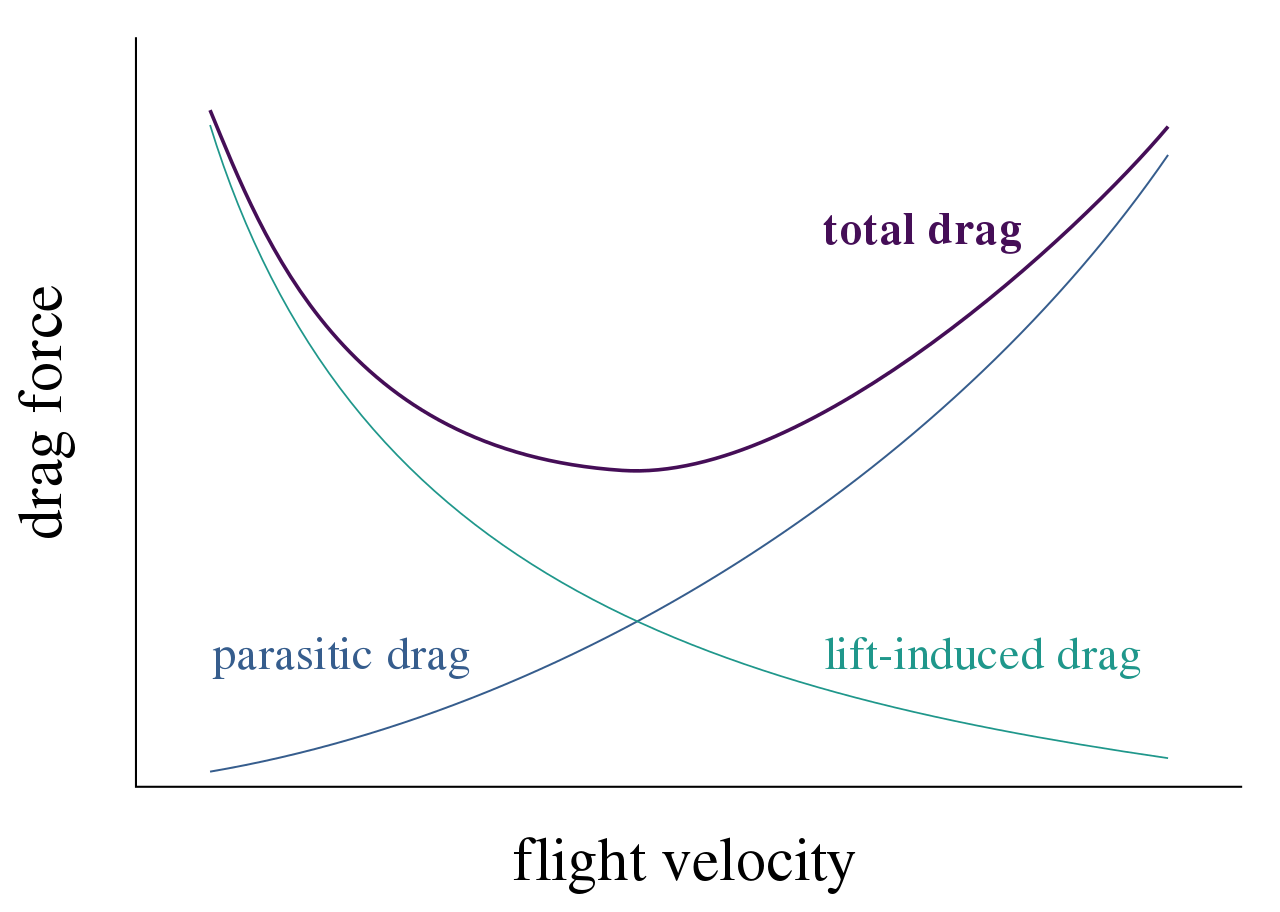
برای یک جسم جامد که در یک سیال حرکت می کند، کشش جزء نیروی خالص آیرودینامیکی یا هیدرودینامیکی است که برخلاف جهت حرکت عمل می کند. [25] [26] [27] [28] بنابراین، کشیدن با حرکت جسم مخالف است و در یک وسیله نقلیه موتوری باید با رانش بر آن غلبه کرد . فرآیندی که لیفت ایجاد میکند نیز باعث درگ میشود.
بالابر آیرودینامیکی با حرکت یک جسم آیرودینامیکی (بال) در هوا ایجاد می شود که به دلیل شکل و زاویه آن هوا را منحرف می کند. برای پرواز مستقیم و همسطح پایدار، بالابر باید برابر و مخالف وزن باشد. به طور کلی، بالهای باریک بلند میتوانند مقدار زیادی هوا را با سرعت آهسته منحرف کنند، در حالی که بالهای کوچکتر برای انحراف مقداری معادل هوا به سرعت رو به جلو بیشتری نیاز دارند و بنابراین مقدار معادلی بالابر تولید میکنند. هواپیماهای باری بزرگ تمایل دارند از بالهای بلندتر با زوایای حمله بالاتر استفاده کنند، در حالی که هواپیماهای مافوق صوت تمایل دارند بالهای کوتاه داشته باشند و برای ایجاد بالابر به شدت به سرعت بالا به جلو متکی هستند.
با این حال، این فرآیند لیفت (انحراف) ناگزیر باعث ایجاد یک نیروی کند کننده به نام درگ می شود. از آنجایی که لیفت و درگ هر دو نیروهای آیرودینامیکی هستند، نسبت بالابر به درگ نشان دهنده کارایی آیرودینامیکی هواپیما است. نسبت بالابر به درگ نسبت L/D است که "نسبت L به D" تلفظ می شود. یک هواپیما اگر مقدار زیادی بالابر یا مقدار کمی پسا تولید کند، نسبت L/D بالایی دارد. نسبت بالابر / درگ با تقسیم ضریب بالابر بر ضریب درگ، CL/CD تعیین می شود. [29]
ضریب بالابر Cl برابر است با بالابر L تقسیم بر (چگالی r برابر نصف سرعت V مجذور مساحت بال A). [Cl = L / (A * 0.5 * r * V^2)] ضریب بالابر نیز تحت تأثیر تراکم پذیری هوا است که در سرعت های بالاتر بسیار بیشتر است، بنابراین سرعت V یک تابع خطی نیست. تراکم پذیری نیز تحت تأثیر شکل سطوح هواپیما قرار دارد. [30]
ضریب پسا Cd برابر است با پسا D تقسیم بر (چگالی r برابر نصف سرعت V مجذور سطح مرجع A). [Cd = D / (A * 0.5 * r * V^2)] [31]
نسبت بالابر به درگ برای هواپیماهای کاربردی از حدود 4:1 برای وسایل نقلیه و پرندگان با بالهای نسبتاً کوتاه، تا 60:1 یا بیشتر برای وسایل نقلیه با بالهای بسیار بلند، مانند گلایدر، متغیر است. زاویه حمله بیشتر نسبت به حرکت رو به جلو، میزان انحراف را افزایش میدهد و در نتیجه باعث افزایش بیشتر میشود. با این حال، زاویه حمله بیشتر نیز کشش اضافی ایجاد می کند.
نسبت بالابر/ کشیدن نیز نسبت سر خوردن و محدوده سر خوردن را تعیین می کند. از آنجایی که نسبت سر خوردن فقط بر اساس رابطه نیروهای آیرودینامیک وارد بر هواپیما است، وزن هواپیما بر آن تأثیری نخواهد داشت. تنها تاثیر وزن این است که زمان سر خوردن هواپیما را تغییر دهد – هواپیمای سنگینتری که با سرعت بالاتری سر میزند، در زمان کوتاهتری به همان نقطه برخورد میشود. [32]
فشار هوا که بر روی یک جسم در هوا وارد می شود بیشتر از فشار بالای فشار به پایین است. شناوری، در هر دو مورد، برابر با وزن سیال جابجا شده است - اصل ارشمیدس برای هوا نیز مانند آب صادق است.
یک متر مکعب هوا در فشار اتمسفر معمولی و دمای اتاق حدود 1.2 کیلوگرم جرم دارد، بنابراین وزن آن حدود 12 نیوتن است . بنابراین، هر جسم 1 متر مکعبی در هوا با نیروی 12 نیوتن شناور می شود. اگر جرم جسم 1 متر مکعبی بیشتر از 1.2 کیلوگرم باشد (به طوری که وزن آن بیشتر از 12 نیوتن باشد)، هنگام رها شدن به زمین می افتد. اگر جرمی به این اندازه کمتر از 1.2 کیلوگرم باشد، در هوا بالا می رود. هر جسمی که جرمی کمتر از جرم یک حجم مساوی از هوا داشته باشد در هوا بالا می رود - به عبارت دیگر، هر جسمی که چگالی کمتر از هوا دارد بالا می رود.
نسبت رانش به وزن ، همانطور که از نامش پیداست، نسبت رانش آنی به وزن است (که وزن به معنای وزن در شتاب استاندارد زمین است ). [33] این یک پارامتر بدون بعد مشخصه راکت ها و سایر موتورهای جت و وسایل نقلیه ای است که توسط چنین موتورهایی به پیش می روند (معمولاً وسایل نقلیه پرتاب فضایی و هواپیماهای جت ).
اگر نسبت رانش به وزن بیشتر از قدرت گرانش محلی (بیان شده بر حسب گرم بر ثانیه) باشد، در این صورت پرواز میتواند بدون نیاز به حرکت رو به جلو یا بالا بردن آیرودینامیکی انجام شود.
اگر نسبت رانش به وزن ضربدر نسبت بالابر به درگ بیشتر از گرانش محلی باشد، برخاستن با استفاده از بالابر آیرودینامیکی امکان پذیر است.

دینامیک پرواز علم جهت گیری و کنترل وسایل نقلیه هوایی و فضایی در سه بعدی است. سه پارامتر حیاتی دینامیک پرواز، زوایای چرخش در سه بعدی در مورد مرکز جرم وسیله نقلیه است که به نامهای گام ، رول و انحراف شناخته میشوند ( برای توضیح به چرخشهای Tait-Bryan مراجعه کنید).
کنترل این ابعاد می تواند شامل یک تثبیت کننده افقی (یعنی "دم")، ایلرون ها و سایر وسایل آیرودینامیکی متحرک باشد که ثبات زاویه ای را کنترل می کنند، یعنی وضعیت پرواز (که به نوبه خود بر ارتفاع ، سمت و سوی حرکت تاثیر می گذارد ). بالها اغلب کمی به سمت بالا زاویه دارند - آنها " زاویه دو وجهی مثبت " دارند که باعث تثبیت غلتکی ذاتی می شود.
ایجاد نیروی رانش به گونه ای که بتوان ارتفاع را به دست آورد، و فشار دادن هوا برای غلبه بر نیروی کششی مرتبط با بلند کردن انرژی نیاز دارد. اشیاء و موجودات مختلف که قادر به پرواز هستند، از نظر کارایی عضلات، موتورها و میزان تاثیر آن به رانش به جلو متفاوت است.
راندمان پیشرانه تعیین می کند که خودروها چه مقدار انرژی از یک واحد سوخت تولید می کنند. [34] [35]
بردی که مقالات پروازی موتوردار می توانند به آن دست یابند در نهایت با کشش آنها و همچنین میزان انرژی که می توانند در هواپیما ذخیره کنند و چقدر کارآمد می توانند آن انرژی را به نیروی محرکه تبدیل کنند محدود می شود. [36]
برای هواپیماهای موتوردار، انرژی مفید با کسر سوخت آنها تعیین می شود - چند درصد از وزن برخاست سوخت، و همچنین انرژی ویژه سوخت مصرفی.
همه حیوانات و وسایلی که قادر به پرواز پایدار هستند، به نسبت قدرت به وزن نسبتاً بالایی نیاز دارند تا بتوانند به اندازه کافی بالابر و/یا نیروی رانش برای رسیدن به برخاستن ایجاد کنند.
وسایل نقلیه ای که می توانند پرواز کنند می توانند راه های مختلفی برای برخاستن و فرود داشته باشند . هواپیماهای معمولی در امتداد زمین شتاب می گیرند تا زمانی که برای برخاستن بالابر کافی ایجاد شود و روند فرود را معکوس می کنند . برخی از هواپیماها می توانند با سرعت کم بلند شوند. به این تیک آف کوتاه می گویند. برخی از هواپیماها مانند هلیکوپترها و جت های پرشی هریر می توانند به صورت عمودی بلند شوند و فرود بیایند. راکت ها نیز معمولاً به صورت عمودی بلند می شوند و فرود می آیند، اما برخی از طرح ها می توانند به صورت افقی فرود آیند.
ناوبری سیستم های لازم برای محاسبه موقعیت فعلی است (به عنوان مثال قطب نما ، GPS ، LORAN ، ردیاب ستاره ، واحد اندازه گیری اینرسی ، و ارتفاع سنج ).
در هواپیما، ناوبری هوایی موفق شامل خلبانی هواپیما از مکانی به مکان دیگر بدون گم شدن، زیر پا گذاشتن قوانین مربوط به هواپیما، یا به خطر انداختن ایمنی سرنشینان یا روی زمین است .
تکنیک های مورد استفاده برای ناوبری در هوا به این بستگی دارد که آیا هواپیما تحت قوانین پرواز بصری (VFR) یا قوانین پرواز با ابزار (IFR) پرواز می کند. در حالت دوم، خلبان منحصراً با استفاده از ابزار و وسایل کمک ناوبری رادیویی مانند چراغها یا طبق کنترل رادار توسط کنترل ترافیک هوایی هدایت خواهد شد . در مورد VFR، یک خلبان تا حد زیادی با استفاده از محاسبه مرده همراه با مشاهدات بصری (معروف به خلبانی )، با اشاره به نقشههای مناسب، پیمایش میکند. این ممکن است با استفاده از وسایل کمک ناوبری رادیویی تکمیل شود.
سیستم هدایت به دستگاه یا گروهی از دستگاهها گفته میشود که در جهتیابی کشتی ، هواپیما ، موشک ، موشک ، ماهواره یا سایر شیهای متحرک استفاده میشوند. به طور معمول، هدایت مسئول محاسبه بردار (یعنی جهت، سرعت) به سمت یک هدف است.
یک سیستم کنترل پرواز هواپیمای بال ثابت متعارف شامل سطوح کنترل پرواز ، کنترل های کابین خلبان مربوطه، اتصالات اتصال و مکانیسم های عملیاتی لازم برای کنترل جهت هواپیما در حین پرواز است. کنترل موتور هواپیما نیز با تغییر سرعت به عنوان کنترل پرواز در نظر گرفته می شود.
در مورد هواپیما، ترافیک هوایی توسط سیستم های کنترل ترافیک هوایی کنترل می شود .
اجتناب از برخورد فرآیند کنترل فضاپیما برای جلوگیری از برخورد است.
ایمنی هوایی اصطلاحی است که شامل تئوری، بررسی و طبقهبندی خرابیهای پرواز و پیشگیری از چنین خرابیهایی از طریق مقررات، آموزش و آموزش است. همچنین می تواند در زمینه کمپین هایی که مردم را در مورد ایمنی سفرهای هوایی آگاه می کند، اعمال شود .
سر جورج کیلی یکی از مهم ترین افراد تاریخ هوانوردی است. بسیاری او را اولین محقق واقعی علمی هوایی و اولین فردی می دانند که اصول اساسی و نیروهای پرواز را درک می کند.
سر جورج کیلی، گاهی اوقات "پدر هوانوردی" نامیده می شود. او که در رشته خود پیشگام است، اولین موفقیت بزرگ در پرواز سنگین تر از هوا را به خود اختصاص داده است. او اولین کسی بود که چهار نیروی آیرودینامیکی پرواز - وزن، بلند کردن، کشش و رانش - و رابطه آنها را شناسایی کرد و همچنین اولین کسی بود که یک گلایدر حامل انسان موفق ساخت.
سر جورج کیلی، متولد 1773، گاهی اوقات پدر هوانوردی نامیده می شود. کیلی که در رشته خود پیشگام است، به معنای واقعی کلمه دارای دو جهش بزرگ خلاقیت هوانوردی است که سالهایی از هم جدا میشوند که در طی آنها کار کمی با این موضوع انجام داده است. او اولین کسی بود که چهار نیروی آیرودینامیکی پرواز - وزن، بالابر، کشش و رانش و رابطه آنها را شناسایی کرد. او همچنین اولین کسی بود که یک گلایدر حامل انسان موفق ساخت. کیلی بسیاری از مفاهیم و عناصر هواپیمای مدرن را توصیف کرد و اولین کسی بود که مفاهیم بالابر و رانش را به صورت مهندسی درک و توضیح داد.
![]() راهنمای سفر با هواپیما از ویکیسفر
راهنمای سفر با هواپیما از ویکیسفر
